水下机器人手指掌握深海生活
深海 - 黑暗,寒冷,高压和无气 - 对人类来说是众所周知的荒凉之物,但却充满了能够在恶劣环境中茁壮成长的生物。研究这些生物需要安装在远程操作车辆(ROV)上的专用设备,这些设备能够承受这些条件以便收集样本。该设备主要设计用于水下石油和采矿业,设备笨重,昂贵,并且难以通过与微妙海洋生物相互作用所需的控制来操纵。用这些工具从海底采摘一个精致的海slu is就像是用修枝剪来采摘葡萄。
现在,一个多学科的工程师,海洋生物学家和机器人专家组开发了一种柔软,灵活和可定制的替代采样装置,使科学家能够从海中轻轻抓取不同类型的生物而不会损坏它们,并且可以对3D打印进行修改。该设备一夜之间无需返回陆基实验室。该研究报告在PLOS One中报道。
“当与柔软,细腻的水下生物互动时,它最适合你的采样设备也柔软温和,”共同作者Rob Wood博士说,他是Wyss Institute的创始核心教员,是还是哈佛大学工程与应用科学学院(SEAS)的查尔斯河工程与应用科学教授。“直到最近,软机器人领域才发展到我们能够真正建造能够可靠无害地抓住这些动物的机器人的地步。”
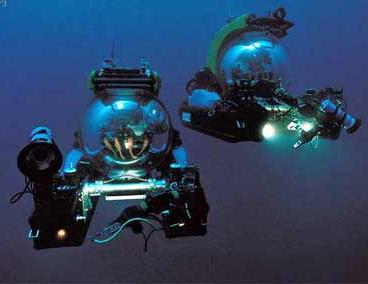
团队设计的“软抓手”设备有两到五个“手指”,由聚氨酯和其他柔软材料制成,可通过低压液压泵系统打开和关闭,该系统使用海水驱动其运动。夹子本身连接到木球上,该木球使用ROV现有的硬爪式工具保持和操纵,该工具由ROV被栓系的船上的操作人员控制。
该团队在南太平洋偏远的凤凰群岛保护区施密特海洋研究所的R / V Falkor航行中部署了他们最新的软式夹具。这样一个孤立的环境意味着为夹具获取新零件几乎是不可能的,因此它们带来了两台3D打印机,用于即时创建新的组件。
“在船上停留一个月意味着我们必须能够制作任何我们需要的东西,事实证明,3D打印机在船上做得非常好。我们让它们几乎全天候运行,我们能够从ROV操作员那里获得有关使用软夹具的经验的反馈,并在一夜之间制造新版本以解决任何问题,“Wyss的研究工程师,Daniel Vogt说道。研究所谁是该论文的第一作者。
与传统的水下取样工具相比,软夹具能够更有效地捕获海slu ,,珊瑚,海绵和其他海洋生物,并且损坏更少。根据ROV操作员的输入,团队3D打印的“指甲”扩展可以添加到夹子的手指,以帮助他们在坐在坚硬表面上的样品下面。每个手指还添加了一个柔韧的网状物,以帮助保持手指握在手指内。根据ROV飞行员对控制现有双指抓手的熟悉程度,以及他们要求两个手指能够抓住“捏”抓取(对于小物体)的样品,创建了另一个两指版的抓手和“力量”掌握(对于大型物体)。
该团队正在继续开发夹具,希望添加传感器,当夹具与生物体接触时,可以向ROV操作员指示,“感觉”它有多硬或多软,并进行其他测量。最终,他们的目标是能够捕获深海中的海洋生物并获取完整的物理和遗传数据,而无需将它们带出原生栖息地。
“能够在几小时内对这些软机器人进行三维打印,以便安全地与不同类型的海洋生物相互作用,这有可能彻底改变海洋生物实地工作的方式,”共同通讯作者David Gruber博士说。他是2017-2018拉德克利夫研究员,国家地理探索者,纽约市立大学巴鲁克学院生物与环境科学教授。
免责声明:本文由用户上传,与本网站立场无关。财经信息仅供读者参考,并不构成投资建议。投资者据此操作,风险自担。 如有侵权请联系删除!
-
6月25-28日,由中国进出境生物安全研究会、中国国际旅行卫生保健协会主办,中国青年创业就业基金会支持,中国出入...浏览全文>>
-
胃肠镜检查,听起来可能有些令人不安,但实际上,它可能是生活中的救命稻草。对于一些人来说,定期进行胃肠镜...浏览全文>>
-
6月16日-20日,2025年优秀博士后研究人员(绍兴)研学活动顺利举行。本次活动汇聚了来自全国各地的百余名博士后,...浏览全文>>
-
近日,天津松果生物医疗科技有限公司自主研发的牛跟腱来源去端肽I型胶原蛋白原材料成功通过国家药品监督管理局...浏览全文>>
-
在数字化产业转型的浪潮奔涌之际,病理学正经历着前所未有的革新机遇。奥伟登(Evident)凭借百年光学技术积淀,以...浏览全文>>
-
6月6-8日,CHINAGUT 2025中国肠道大会在宁波国际会议中心隆重举办。大会由南京医科大学第二附属医院、国家消化...浏览全文>>
-
在第28届北京国际口腔展这一行业风向标级盛会上,北京易岭生物科技有限公司(下面简称易岭生物)凭借重磅新品发...浏览全文>>
-
2025款上汽大众ID 4 X在安徽阜阳地区的售价会根据配置和选装包有所不同。基础版车型的厂商指导价大约在20万...浏览全文>>
-
岚图FREE,作为一款集豪华与智能于一体的新能源SUV,正以全新的姿态迎接每一位渴望高品质出行的用户。现在,岚...浏览全文>>
-
安徽阜阳的大众ARTEON 2022新款现已到店,最低售价从34 80万元起,无疑是近期购车的最佳时机。这款车型以其...浏览全文>>